

















Category: Inspiring Teachers
Banerjee & Duflo: 14.73 Lecture 01 — Introduction
5.98K Views0 Comments3 Likes
Prof. Abhijit Banerjee provides an introduction to the study of global poverty. The class dicusses the challenges of world poverty. Recorded 2011.
Banerjee & Duflo: 14.73 Lecture 02 — What is a Poverty Trap?
4.63K Views0 Comments1 Likes
Prof. Esther Duflo provides an introduction to the idea of poverty traps. Recorded 2011.

Banerjee & Duflo: 14.73 Lecture 03 — Social Experiments: Why and How?
3.02K Views0 Comments0 Likes
In this lecture, Prof. Esther Duflo talks about social experiments done to understand what interventions work best to mitigate world poverty. Recorded 2011.
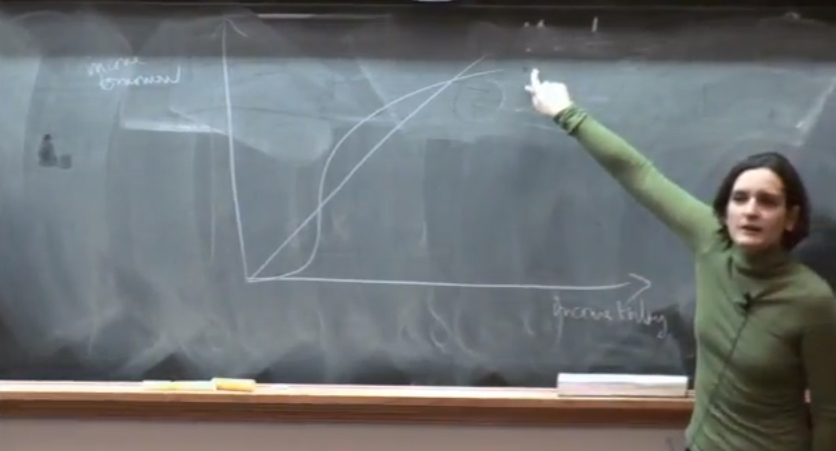
Banerjee & Duflo: 14.73 Lecture 05 — Is There a Nutrition-Based Poverty Trap?
3.08K Views0 Comments1 Likes
In this lecture, Prof. Esther Duflo covers malnutriton and the nutrition-based poverty trap, including the relationship between productivity and nutrition. Recorded 2011.
Banerjee & Duflo: 14.73 Lecture 06 — Nutrition: The Hidden Traps
3.09K Views0 Comments1 Likes
In this lecture, Prof. Esther Duflo discusses nutrition as a hidden trap. Recorded 2011.
Banerjee & Duflo: 14.73 Lecture 08 — Health: Low Hanging Fruit?
3.14K Views0 Comments0 Likes
Prof. Esther Duflo discusses some of the most effective and cheapest ways to promote good health, such as bednets, immunization, and breast feeding. Recorded 2011.
Banerjee & Duflo: 14.73 Lecture 09 — Education: Setting the Stage
3.21K Views0 Comments0 Likes
Prof. Esther Duflo covers the themes portrayed in the film Educating Yaparak and examines education through the lens of economics. Recorded 2011.
Banerjee & Duflo: 14.73 Lecture 10 — Is It Possible to Deliver Quality Education to the Poor…
3.10K Views0 Comments2 Likes
Is it possible to Deliver Quality Education to the Poor: The Pratham-JPAL Partnership. Prof. Esther Duflo's lecture discusses various experiments and interventions in education, specifically in India. The work of the ...
Banerjee & Duflo: 14.73 Lecture 11 — Education: The Man Made Trap
3.04K Views0 Comments0 Likes
Prof. Abhijit Banerjee discusses the perceived returns of education and highlights various studies done on the subject. Recorded 2011.
Banerjee & Duflo: 14.73 Lecture 12 — (Somewhat) Un-Orthodox Findings on the Family
2.63K Views0 Comments0 Likes
Prof. Esther Duflo discusses what drives fertility decisions. Topics include family planning, population growth, quality-quantity trade off, and China's one-child policy, among other topics. Recorded 2011.